News
September 2010
August 2010
Theriault et al. ICPR
December 2009
Wu et al. WMVC
October 2009
Wu et al. ICCV
July 2008
New NSF grant,
Project
website.
April 2008
Betke et al. in
Nature, 452,
Research Highlights, p. 507,
pdf
February 2008
Journal of Mammalogy paper,
pdf
October 2007
- EcoTracker 2.1
posted
July 2007
- Redesigned Website posted
- EcoTracker 2.0
posted
-
Video of EcoTracker in use
June 2007


Detection, Tracking (2D, 3D) and Censusing
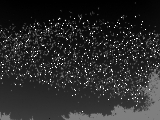
Censusing natural populations of bats is important for understanding the ecological and economic impact of these animals on terrestrial ecosystems. Colonies of Brazilian free-tailed bats (Tadarida brasiliensis) are of particular interest because they represent some of the largest aggregations of mammals known to mankind. It is challenging to census these bats accurately, since they emerge in large numbers at night from their day-time roosting sites. The group has used infrared thermal cameras to record Brazilian free-tailed bats in California, Massachusetts, New Mexico, and Texas. The group has developed automated image analysis methods that detect, track, and count emerging bats.
Margrit Betke (BU Computer Science) and Thomas Kunz (BU Biology) and their groups started collaborating on thermal video analysis of bats in 2002. In the beginning of the project, the group focused on the problem of censusing bat colonies. They were funded from 2003-2009 by an ITR grant from NSF (PI Kunz) and are now funded by a 5-year HCC grant from NSF (PI Betke) and a new ONR MURI (PI Morgansen, UW).
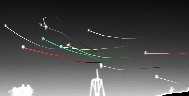
In 2004, the group started to employ two and later three cameras to image emerging and foraging bats. Tracking multiple flying animals in several camera views is challenging because data association must be performed not only across time, as in single-camera or radar-based tracking, but also across camera views; this is a multidimensional assignment problem and is NP-hard. In contrast to previously published work on 3D tracking from several cameras, the group's state-of-the-art approach (1) uses a deferred-logic (not a sequential) tracking framework, (2) can handle dense groups of targets, and (3) does not assume that target motion is restricted to occur on a ground plane.
The group applied a Greedy Randomized Search (GRASP) algorithm to the multidimensional assignment problem of associating observations from different cameras, minimizing the stereoscopic reconstruction error of the associations and reducing the search space by considering an epipolar neighborhood. GRASP provides an initial solution to the assignment problem in a given time step, which is then improved by considering GRASP associations across multiple time steps. This approach has proven capable in addressing the difficult tracking and assignment problems that involve hundreds of bats emerging from a cave colony. It will cope effectively with the simpler tracking problem that involve small numbers of foraging bats. The research team has also tested a variant of the above algorithm which solves the assignment and 3D reconstruction problem in a different order, beginning with a predicted 3D position and assigning 2D observations; this approach may be more appropriate in recordings with dense clutter and more occlusions.
Research Team
Faculty
 |
 |
 |
 |
| Margrit Betke | Cutler Cleveland | Thomas Kunz | Stan Sclaroff |
- John Baillieul, Boston University
- Calin Belta, Boston University
- Thomas Daniel, University of Washington
- Thomas G. Hallam, University of Tennessee
- Ty Hedrik, University of North Carolina
- Timothy Horiuchi, University of Maryland College Park
- Sean Humbert, University of Maryland College Park
- Nicholas C. Makris, Massachusetts Institute of Technology
- Kristi Morgansen, University of Washington
- Gary F. McCracken, University of Tennessee
- Ioannis Paschalidis, Boston University
- John K. Westbrook, US Department of Agriculture
Students and Postdocs
