Hand shape with two parameters (about 3400 images)
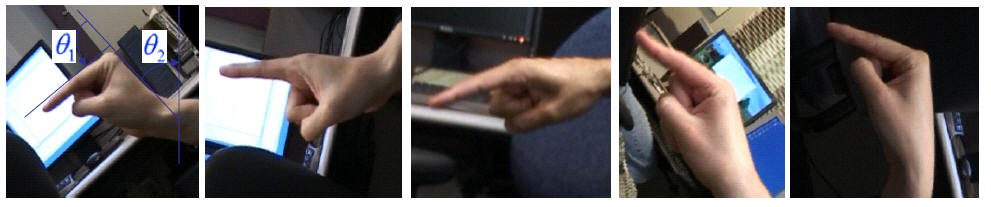
part 1, part 2, part 3. To get annotations, in matlab call "info = imfinfo(tif_filename);"
In the string "info", the first four numbers define a bounding box, and the last two numbers are raw angles of \theta_1 and \theta_2. \theta_1 is in degrees while \theta_2 is in radians.
The two raw angle parameters can be normalized to [0,90] by following two commands in Matlab:
all_parameters(:,1) = (all_parameters(:,1) - 90); all_parameters(:,2) = (all_parameters(:,2)*180/pi + 90);
Hand shape images from ASL and Flemish sign language sequences, with hand
silhouettes.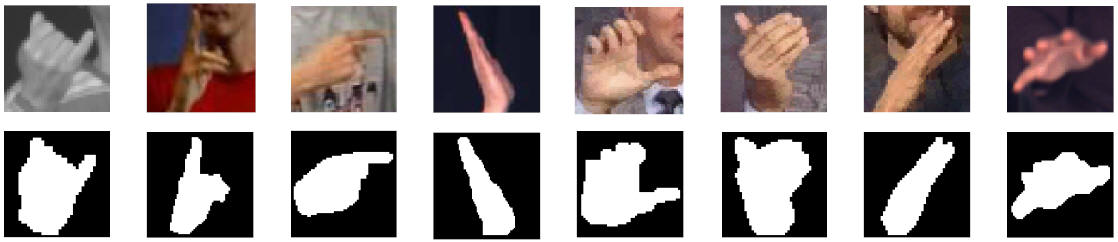
The dataset has two parts, A) 902 hand images from expert signers, with silhouettes. B) 154 hand images from non-expert signers, with bounding boxes. Each hand image is also rotated by [-40, 20 ,0 ,20 ,40] degrees to generate the training and test sets in the CVPR08 paper.