Charlie-1: PC-controlled Ultrasonic Range Finding
- This project was for my Master of Engineering degree, at Newcastle upon Tyne, England.
Related Papers
- Charles Allen and Richard West, "Collision Avoidance Tests Using the Charlie Trike Vehicle" , in Proceedings of the SPIE - The International Society for Optical Engineering, vol.1825, p.549-60, 1992.
Further Details
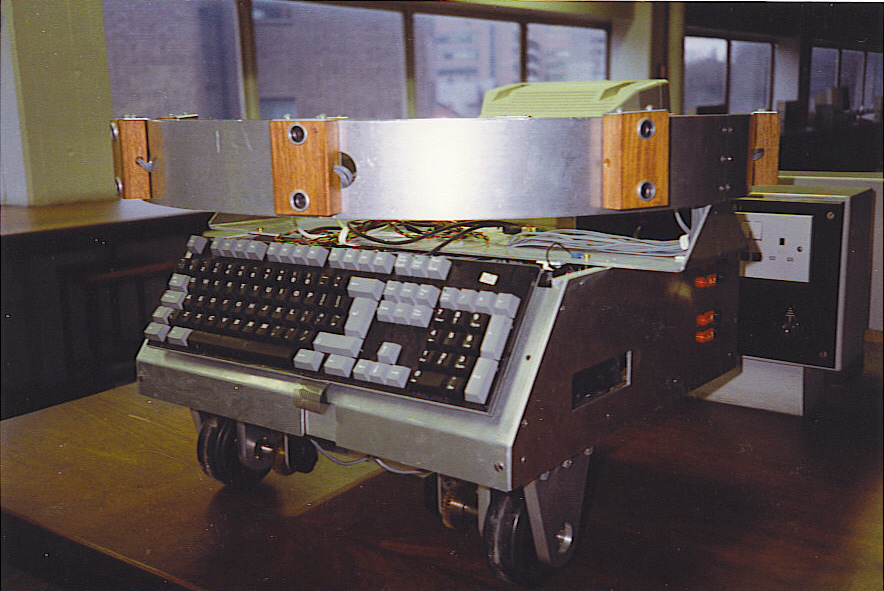
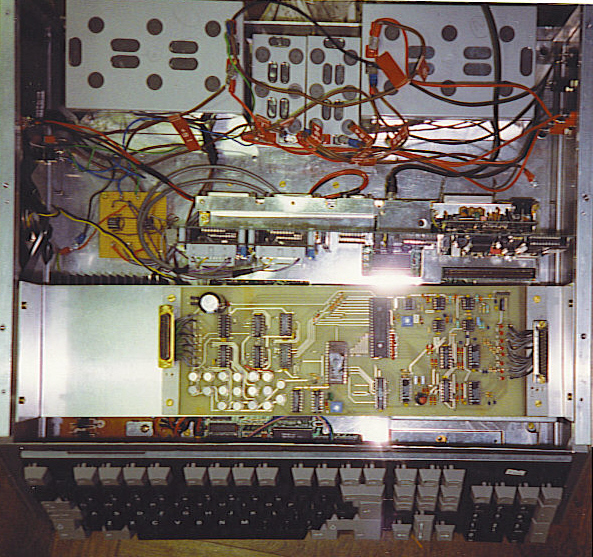
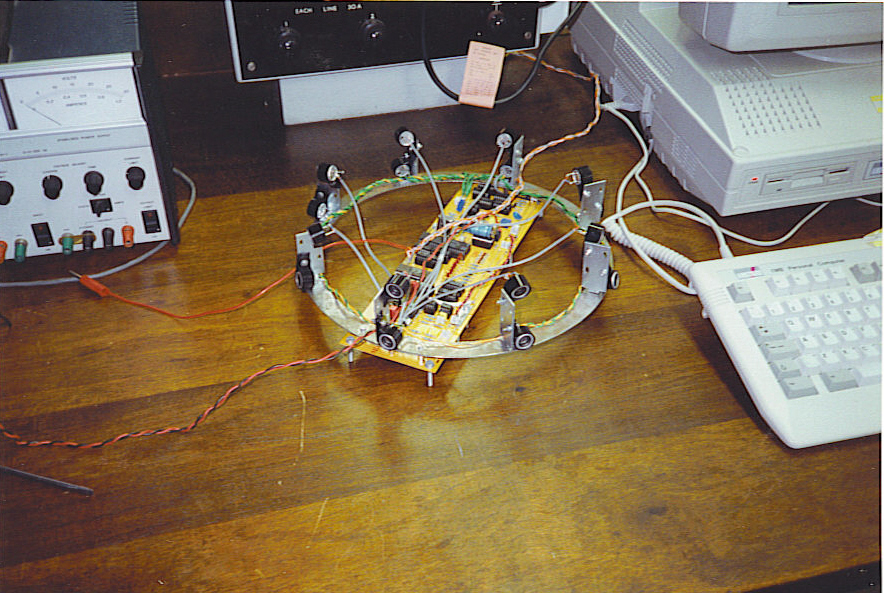
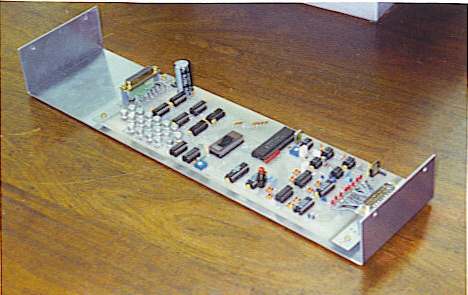
- Here are some pictures of the Charlie 1 robot with my
ultrasonic
range finding circuitry.
- The range finder featured a 40Khz positive feedback bandpass filter, h-bridge, 8051 microcontroller, on-board EPROM and serial connection to a PC.
|
 |
| |
|
 |
 |
|
|