
High-Speed Autonomous Vehicle Control
Overview
-
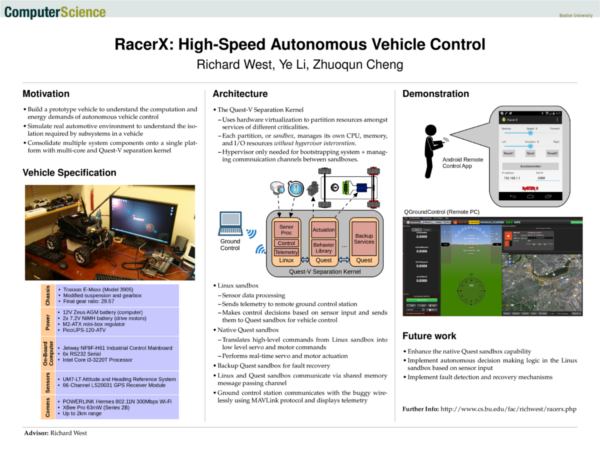
RacerX is an autonomous vehicle application for our Quest(-V)
project. It features an on-board PC for sensor data processing,
telemetry, and navigation. By equipping the vehicle with a
virtualization-aware processor, software faults and soft errors
(hardware bitflips and spurious signal errors) can be handled in
real-time. RacerX supports failsafe methods such as Triple Modular
Redundancy (TMR) to recover from errors, without affecting vehicle
mission objectives, where possible.
Poster
Acknowledgement
This work is funded in part by various grants, including: NSF #0615153 and #1117025.Quest, still
searching...